18-05 FPGAに実装して人・自動車・二輪車の認識
●重み係数などのHDLを置き換えて実装
人・車・バイクの認識用に生成したHDLファイル(これ)を解凍し、Quartusプロジェクトのものと置き換えます。さらにこれも置き換えましょう(*1)。その後はGTSRBやlisa-croppedを参考にFPGAに書き込みます。
(*1)「背景の認識結果」を映さないモードをSWで切り替えるように変更
図18‐35はNiosIIマイコンのプログラムの一部ですが、THRESHは0xC0辺りが良いと思います(認識あり/なしの閾値はC言語で設定)。 |
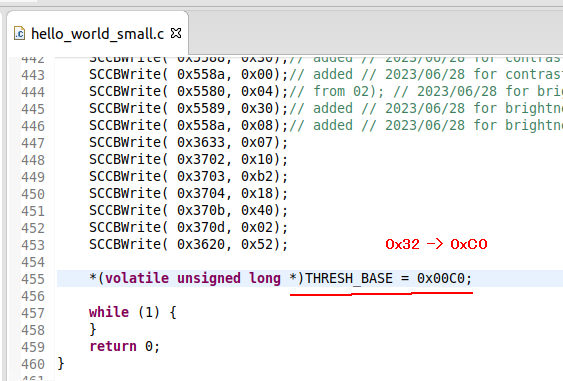
図18-35 しきい値は適当に調整する
●パソコン画面をカメラで撮る
FPGAに実装したら、この画像をノートパソコンなどに表示して、それにカメラを向けてみましょう(図18‐36)。 |

図18-36 人・車・バイク認識の実験
●人・車・バイク+背景7クラスの判定例を見る
図18‐37のように背景がたくさん認識されていると思います(表18-05に推論ラベルの説明)。
表18‐05 認識結果が緑色で動画に上書き
| B |
二輪車 |
動くもの |
| C |
四輪車 |
| H |
ヒト |
| W |
白 |
背景 |
| b |
ベージュ |
| K |
黒 |
| WK |
白→黒 |
| KW |
黒→白 |
W
K |
白→黒(縦方向) |
K
W |
黒→白(縦方向) |
|

図18-37 背景の認識がびっしり
●スライドスイッチでモード切替
DE1-SoCのスライドSWが図18‐38(a)のようになっていると「背景の認識結果」も表示してしまいます。同図(b)のように右から3番目のSWをH(基板内側)にしてみましょう。 |
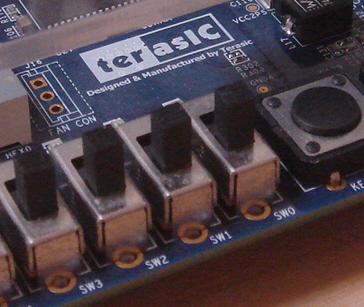 図18‐38(a) 図18‐38(a)
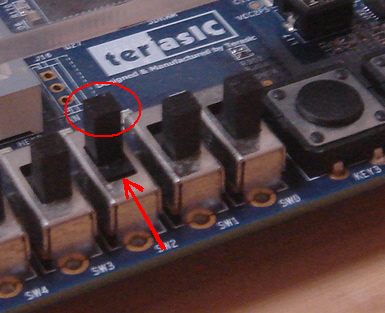 図18‐38(b) 図18‐38(b)
●右から3番目のSWをHにすると・・・
背景の認識結果を消し去ると図18‐39のようにヒト(H)、バイク(B)、車(C)だけになってスッキリします(若干の誤認識はある)。 |
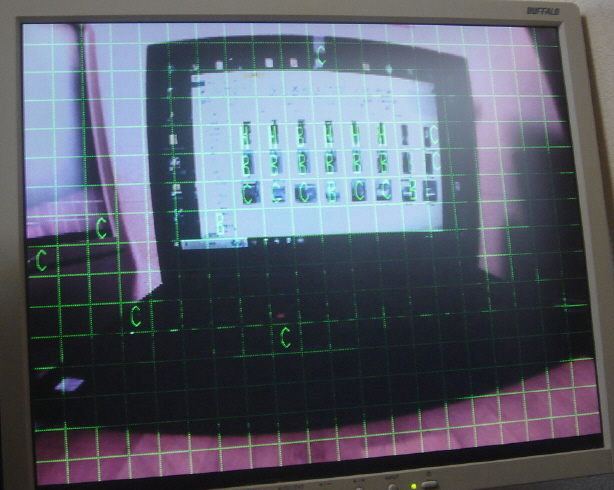
図18‐39 上の列はほぼH、真ん中はB、下の列はほぼC
●背景認識がキモになる
上記のような人・車・バイクの認識のようすはこのYoutube動画をご覧ください。(誤認識を避けるための「背景の認識」というアイデアです) |
最初のページへ
目次へ戻る
|