5乚01 HDL偺慡懱峔惉
仠僇儊儔亄傾僟僾僞儃乕僪亄FPGA儃乕僪偱儕傾儖僞僀儉摦夋張棟両
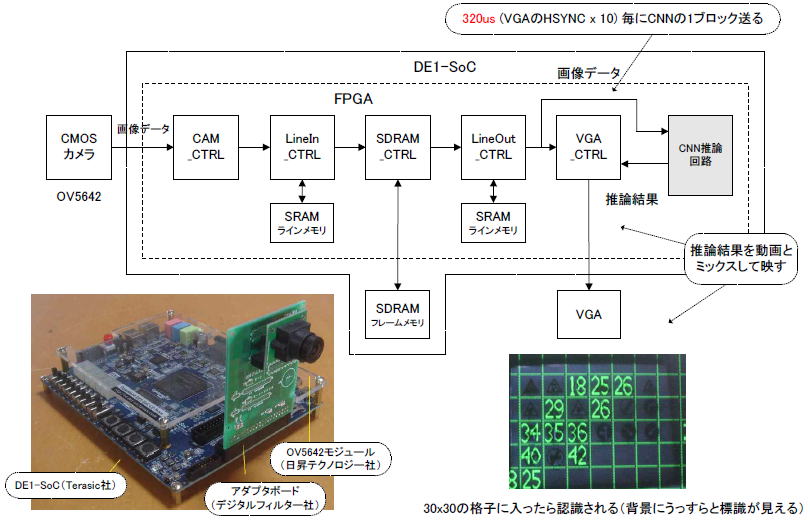
丂恾5乚01偵摴楬昗幆擣幆僔僗僥儉偺慡懱憸傪帵偟傑偡丅CMOS僇儊儔偼OV5642儌僕儏乕儖乮OmniVision偺僀儊乕僕僙儞僒搵嵹乯偱丄CAM_CTRL偼偦傟傪惂屼偡傞僽儘僢僋偱偡丅
丂LineIn_CTRL偼僇儊儔偲VGA偺悈暯摨婜傪偲傞夞楬丄SDRAM_CTRL偼悅捈摨婜傪偲傞夞楬偱偡偱偡乮仏侾乯丅
乮仏侾乯儔僀儞儊儌儕偼FPGA撪晹SRAM傪巊梡丄僼儗乕儉儊儌儕偼FPGA
奜晹
偺SDRAM乮IS42S16320F丄64MB丄ISSI幮乯傪巊偆丅
丂VGA_CTRL偼VGA偵摦夋傪塮偡偨傔偺夞楬偱偡偑丄摨恾偺塃壓偺傛偆偵乽悇榑寢壥乿傕儈僢僋僗偝傟丄摦夋偲偲傕偵VGA偵塮偟弌偝傟傑偡丅
恾5-01丂HDL壔偡傞偲偙偺傛偆側儌僕儏乕儖峔惉偵側傞
仠320us偺廃婜偱悇榑偡傞
丂忋恾偺乽CNN悇榑夞楬乿偑GTSRB乮僪僀僣偺摴楬昗幆擣幆乯傪HDL壔偟偨傕偺偵側傝傑偡丅LineOut_CTRL偐傜夋憸僨乕僞偑憲傜傟傑偡偑丄偦偺廃婜乮CNN偺1僽儘僢僋偑憲傜傟傞帪娫乯偼
320us
(VGA偺悈暯摨婜偺10夞傇傫乯偵側傝傑偡丅
丂摨恾偺塃壓偺幨恀偺傛偆偵丄CNN偺僽儘僢僋偼30亊30夋慺偱丄320us偺廃婜偱奺僽儘僢僋偑師偐傜師傊偲CNN悇榑夞楬偵擖椡偝傟傑偡丅偡側傢偪
偦偺廃婜撪偱CNN1僽儘僢僋偺悇榑傪廔偊傞
昁梫偑偁傝傑偡丅偦傟偑偱偒傟偽320us偑摴楬昗幆擣幆偺乽
僗儖乕僾僢僩
乿偵側傝傑偡乮仏俀乯
乮仏俀乯VGA偼640x480夋慺偁傝丄偦傟傪30x30夋慺偺CNN僽儘僢僋偵暘偗偰悇榑偡傞乮
偙偙
嶲徠乯丅偦偺僽儘僢僋偺廃婜偑僗儖乕僾僢僩乮320us乯偲側傝丄夋柺慡懱偺悇榑偼傕偭偲抶偔側傞丅
仠奺憌偺娫偵夋憸
儊儌儕
偑擖傞
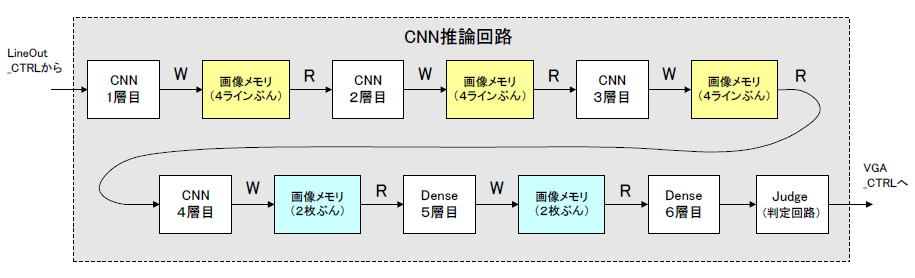
丂恾5乚02偼CNN悇榑夞楬偺撪晹僽儘僢僋恾偱偡丅1乣4憌栚偼忯傒崬傒乮CNN)丄5仌6憌栚偼Dense乮慡寢崌宆乯偱偡丅奺憌娫偵偼乽夋憸儊儌儕乿偑偁傝偦傟傪夘偟偰僨乕僞偑搉偝傟傑偡丅
丂6憌栚偺弌椡偼Judge乮敾掕夞楬乯偱悇榑寢壥偲側傝丄VGA_CTRL偵弌椡偝傟傑偡丅
恾5乚02丂夋憸儊儌儕偼4儔僀儞傇傫乮墿怓乯偲2僼儗乕儉傇傫乮悈怓乯偺2庬椶
仠奺憌偼弴斣偵摦偔偺偱偼側偔摨帪偵摦偔
丂慜弎偺傛偆偵CNN悇榑夞楬偵偼320us枅偵30亊30夋慺偺僨乕僞偑師乆偲擖椡偝傟傑偡丅偟偨偑偭偰奺憌偼偦偺婜娫撪偵墘嶼傪廔偊傞昁梫偑偁傝傑偡乮仏俁乯丅
乮仏俁乯奺憌偼暲楍摦嶌乮僷僀僾儔僀儞乯偡傞偺偱乽
奺憌扨懱
乿偱320us枹枮偱偁傟偽傛偄乮1乣6傑偱偺乽慡憌僩乕僞儖乿偺帪娫偱偼側偄乯
師偺儁乕僕傊
栚師傊栠傞