A-01 サーボモーターでカラーボールを追いかける!
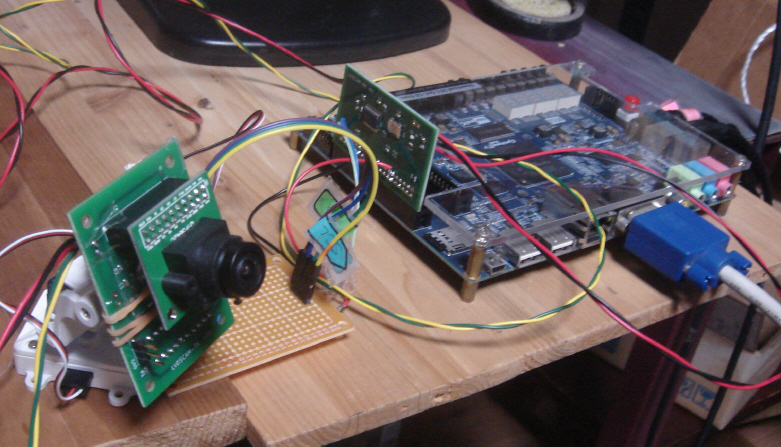 図A-01 DE1-SoC, LVDSCAM-TX/RX, GH-S37D(2個)で作る物体追従カメラシステム
 図A-02 モータ2個を制御してパン/チルト
 図A-03 認識結果によりArducam Upgraded Camera Pan Tilt Platformを動かす
目次へ戻る |
||||||||||||||||||||
A-01 サーボモーターでカラーボールを追いかける!
図A-01 DE1-SoC, LVDSCAM-TX/RX, GH-S37D(2個)で作る物体追従カメラシステム
図A-02 モータ2個を制御してパン/チルト
図A-03 認識結果によりArducam Upgraded Camera Pan Tilt Platformを動かす
目次へ戻る |
||||||||||||||||||||