4-02 カメラエミュレータROMのHDL生成
 図4‐02 EXCELの入力は左上の標識だけ(57番目)
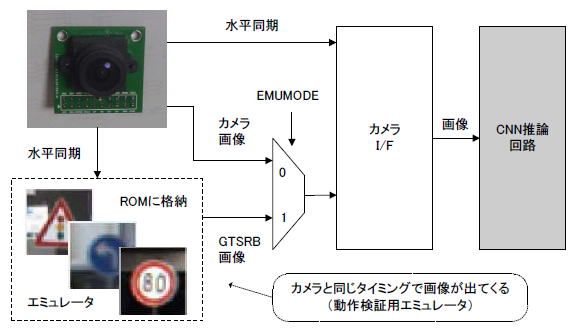 図4‐03 GTSRBテスト画像を20枚ROMから推論回路へ
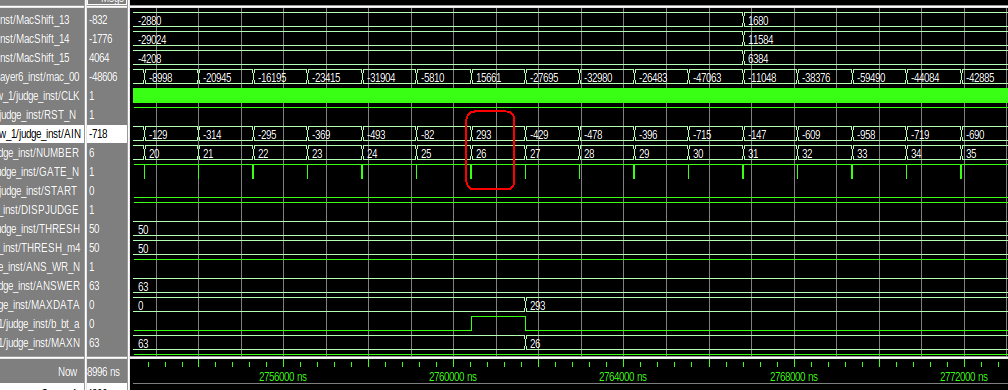 図4‐04 シミュレーション結果(AIN)がPythonと一致。推論ラベルは26 次のページへ 目次へ戻る |
||||||
4-02 カメラエミュレータROMのHDL生成
図4‐02 EXCELの入力は左上の標識だけ(57番目)
図4‐03 GTSRBテスト画像を20枚ROMから推論回路へ
図4‐04 シミュレーション結果(AIN)がPythonと一致。推論ラベルは26 次のページへ 目次へ戻る |
||||||